Service server API. More...
#include "nros/types.h"
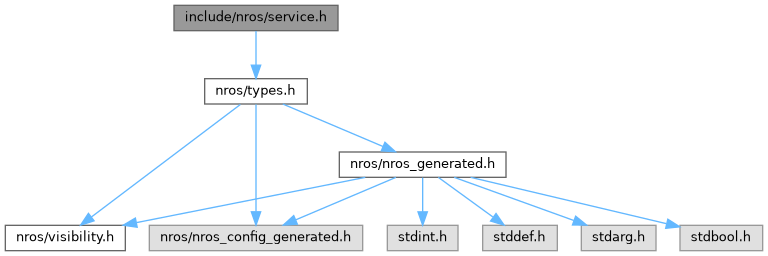
Include dependency graph for service.h:
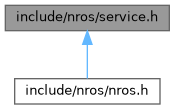
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Detailed Description
Service server API.
Create service servers with nros_service_init(), take incoming requests with nros_service_take_request(), and send responses with nros_service_send_response(). For executor-driven dispatch, register a nros_service_callback_t at init time.