nros::ActionServer<A> — typed action server.
More...
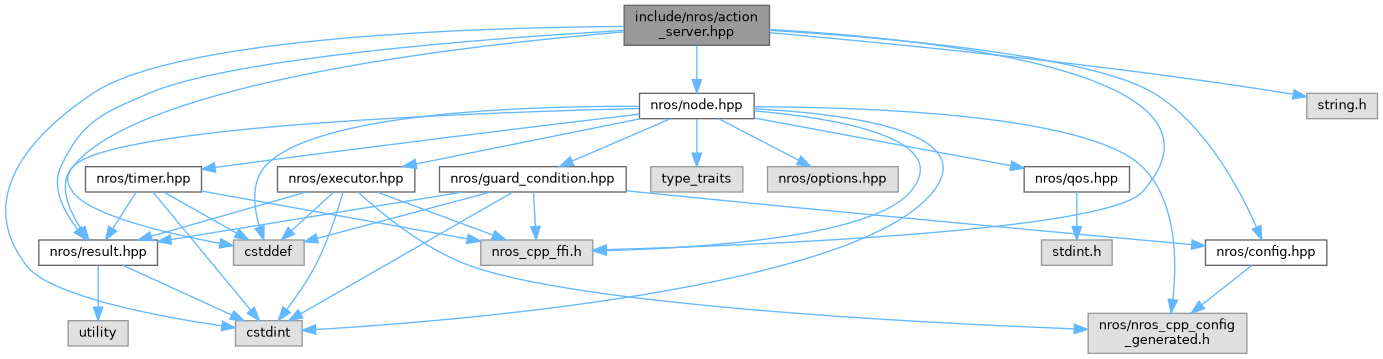
#include <cstdint>#include <cstddef>#include <string.h>#include "nros/config.hpp"#include "nros/result.hpp"#include "nros_cpp_ffi.h"#include "nros/node.hpp"
Include dependency graph for action_server.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | nros::ActionServer< A > |
Namespaces | |
| namespace | nros |
Typedefs | |
| typedef int32_t(* | nros_cpp_cancel_callback_t) (const uint8_t goal_id[16], void *ctx) |
| typedef int32_t(* | nros_cpp_goal_callback_t) (const uint8_t goal_id[16], const uint8_t *data, size_t len, void *ctx) |
Enumerations | |
| enum class | nros::CancelResponse : int32_t { nros::Reject = 0 , nros::Accept = 1 } |
| Cancel acceptance response returned from the user's cancel callback. More... | |
| enum class | nros::GoalResponse : int32_t { nros::Reject = 0 , nros::AcceptAndExecute = 1 , nros::AcceptAndDefer = 2 } |
| Goal acceptance response returned from the user's goal callback. More... | |
| enum class | nros::GoalStatus : int8_t { nros::Unknown = 0 , nros::Accepted = 1 , nros::Executing = 2 , nros::Canceling = 3 , nros::Succeeded = 4 , nros::Canceled = 5 , nros::Aborted = 6 } |
Functions | |
| nros_cpp_ret_t | nros_cpp_action_server_set_callbacks (void *handle, nros_cpp_goal_callback_t goal_cb, nros_cpp_cancel_callback_t cancel_cb, void *ctx) |
Detailed Description
nros::ActionServer<A> — typed action server.
Typedef Documentation
◆ nros_cpp_cancel_callback_t
| typedef int32_t(* nros_cpp_cancel_callback_t) (const uint8_t goal_id[16], void *ctx) |
◆ nros_cpp_goal_callback_t
| typedef int32_t(* nros_cpp_goal_callback_t) (const uint8_t goal_id[16], const uint8_t *data, size_t len, void *ctx) |
Function Documentation
◆ nros_cpp_action_server_set_callbacks()
| nros_cpp_ret_t nros_cpp_action_server_set_callbacks | ( | void * | handle, |
| nros_cpp_goal_callback_t | goal_cb, | ||
| nros_cpp_cancel_callback_t | cancel_cb, | ||
| void * | ctx | ||
| ) |