nros::Future<T> — single-shot deferred result.
More...
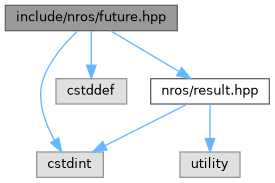
Include dependency graph for future.hpp:
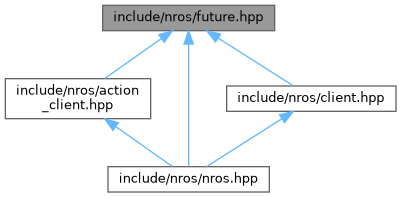
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | nros::Future< T > |
Namespaces | |
| namespace | nros |
Typedefs | |
| typedef int | nros_cpp_ret_t |
Functions | |
| nros_cpp_ret_t | nros_cpp_spin_once (void *handle, int32_t timeout_ms) |
| uint64_t | nros_cpp_time_ns (void) |
Detailed Description
nros::Future<T> — single-shot deferred result.
Typedef Documentation
◆ nros_cpp_ret_t
| typedef int nros_cpp_ret_t |
Function Documentation
◆ nros_cpp_spin_once()
| nros_cpp_ret_t nros_cpp_spin_once | ( | void * | handle, |
| int32_t | timeout_ms | ||
| ) |
◆ nros_cpp_time_ns()
| uint64_t nros_cpp_time_ns | ( | void | ) |
Monotonic time in nanoseconds. Used by Future::wait() to budget its spin loop by wall-clock, not iteration count (Phase 89.2).