nros::Stream<T> — multi-shot message receiver.
More...
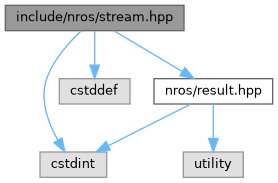
#include <cstdint>
#include <cstddef>
#include "nros/result.hpp"
Go to the source code of this file.
nros::Stream<T> — multi-shot message receiver.
◆ nros_cpp_ret_t
◆ nros_cpp_spin_once()
| nros_cpp_ret_t nros_cpp_spin_once |
( |
void * |
handle, |
|
|
int32_t |
timeout_ms |
|
) |
| |
◆ nros_cpp_time_ns()
| uint64_t nros_cpp_time_ns |
( |
void |
| ) |
|
Monotonic time in nanoseconds. Stream::wait_next() budgets its spin loop by wall-clock, not iteration count (Phase 118.C — same fix Future::wait() got in Phase 89.2; Stream was missed).