nros::Node and global session helpers.
More...
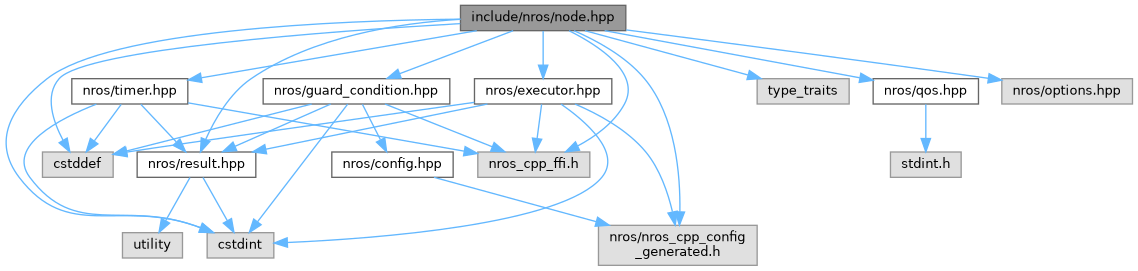
#include <cstdint>#include <cstddef>#include <type_traits>#include "nros_cpp_ffi.h"#include "nros/result.hpp"#include "nros/nros_cpp_config_generated.h"#include "nros/qos.hpp"#include "nros/options.hpp"#include "nros/timer.hpp"#include "nros/guard_condition.hpp"#include "nros/executor.hpp"
Include dependency graph for node.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | nros::Node |
| class | nros::NodeBuilder |
Namespaces | |
| namespace | nros |
Functions | |
| Result | nros::create_node (Node &out, const char *name, const char *ns=nullptr) |
| Result | nros::init (const char *locator, uint8_t domain_id, const char *session_name) |
| Result | nros::init (const char *locator=nullptr, uint8_t domain_id=0) |
| Result | nros::init_with_launch (const char *path, int argc=0, char **argv=nullptr, const char *session_name=nullptr) |
| Result | nros::init_with_launch_auto (int argc=0, char **argv=nullptr, const char *session_name=nullptr) |
| Expected< Node > | nros::make_node (const char *name, const char *ns=nullptr) |
| bool | nros::ok () |
| Check if the nros session is initialized. | |
| Result | nros::shutdown () |
Detailed Description
nros::Node and global session helpers.