#include <nros_generated.h>
Data Fields | |
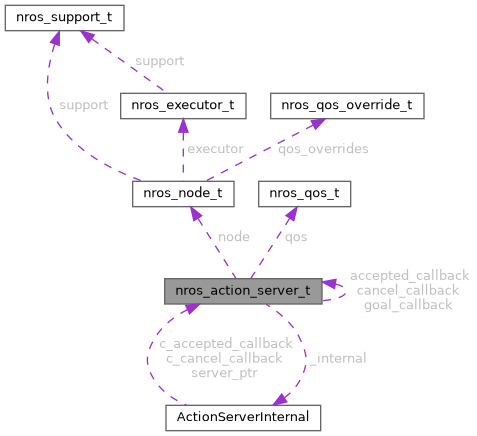
| struct ActionServerInternal | _internal |
| uint64_t | _opaque [ACTION_SERVER_OPAQUE_U64S] |
| nros_accepted_callback_t | accepted_callback |
| uint8_t | action_name [256] |
| size_t | action_name_len |
| nros_cancel_callback_t | cancel_callback |
| void * | context |
| nros_goal_callback_t | goal_callback |
| const struct nros_node_t * | node |
| struct nros_qos_t | qos |
| nros_sched_context_id_t | sched_context_id |
| enum nros_action_server_state_t | state |
| uint8_t | type_hash [128] |
| size_t | type_hash_len |
| uint8_t | type_name [256] |
| size_t | type_name_len |
Detailed Description
Action server structure.
Field Documentation
◆ _internal
| struct ActionServerInternal nros_action_server_t::_internal |
Internal state — set by nros_executor_register_action_server. Typed C-ABI handle field (was an opaque blob in earlier versions).
◆ _opaque
| uint64_t nros_action_server_t::_opaque[ACTION_SERVER_OPAQUE_U64S] |
Phase 122.3.c.6.b — inline opaque storage for the L1 polling-mode ActionServerCore. Zeroed in L2 mode; populated by nros_action_server_init_polling.
◆ accepted_callback
| nros_accepted_callback_t nros_action_server_t::accepted_callback |
Accepted callback
◆ action_name
| uint8_t nros_action_server_t::action_name[256] |
Action name storage
◆ action_name_len
| size_t nros_action_server_t::action_name_len |
Action name length
◆ cancel_callback
| nros_cancel_callback_t nros_action_server_t::cancel_callback |
Cancel callback
◆ context
| void* nros_action_server_t::context |
User context pointer
◆ goal_callback
| nros_goal_callback_t nros_action_server_t::goal_callback |
Goal callback
◆ node
| const struct nros_node_t* nros_action_server_t::node |
Pointer to parent node
◆ qos
| struct nros_qos_t nros_action_server_t::qos |
Phase 193.4b — action-server QoS, applied to the three underlying service servers (send_goal / cancel_goal / get_result). The feedback + status publishers keep their own profiles. Defaults to the services profile (RELIABLE+VOLATILE+KEEP_LAST(10)); set via nros_action_server_init_with_qos.
◆ sched_context_id
| nros_sched_context_id_t nros_action_server_t::sched_context_id |
Phase 189.M3.3.b — scheduling-context slot to bind the action server's executor handle to (the goal-service slot; governs the action's callback dispatch). 0 = inherit the executor / Node default; set via nros_action_server_init_with_options. When non-zero, nros_executor_register_action_server binds the handle after registration. No effect on the L1 polling path.
◆ state
| enum nros_action_server_state_t nros_action_server_t::state |
Current state
◆ type_hash
| uint8_t nros_action_server_t::type_hash[128] |
Type hash storage
◆ type_hash_len
| size_t nros_action_server_t::type_hash_len |
Type hash length
◆ type_name
| uint8_t nros_action_server_t::type_name[256] |
Type name storage
◆ type_name_len
| size_t nros_action_server_t::type_name_len |
Type name length
The documentation for this struct was generated from the following file:
- include/nros/nros_generated.h