#include <nros_generated.h>
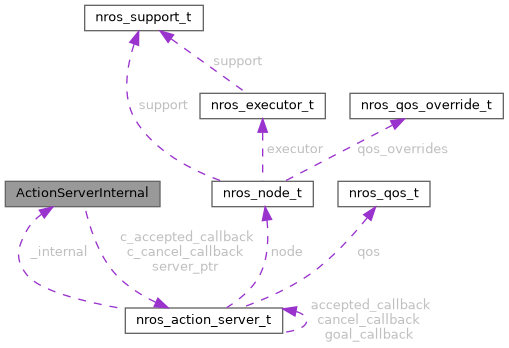
Collaboration diagram for ActionServerInternal:
Data Fields | |
| nros_accepted_callback_t | c_accepted_callback |
| nros_cancel_callback_t | c_cancel_callback |
| void * | c_context |
| enum nros_goal_response_t(* | c_goal_callback )(struct nros_action_server_t *, const struct nros_goal_handle_t *, const uint8_t *, size_t, void *) |
| void * | executor_ptr |
| ActionServerRawHandle | handle |
| struct nros_action_server_t * | server_ptr |
Detailed Description
Internal state created during executor registration.
Holds the action server handle and C callback pointers needed by the goal/cancel trampolines.
handle was Option<ActionServerRawHandle> previously; now it is always present, with the sentinel INVALID_ENTRY_INDEX indicating "not registered yet". Use is_handle_set() to check.
Field Documentation
◆ c_accepted_callback
| nros_accepted_callback_t ActionServerInternal::c_accepted_callback |
C accepted callback from init (may be None).
◆ c_cancel_callback
| nros_cancel_callback_t ActionServerInternal::c_cancel_callback |
C cancel callback from init (may be None).
◆ c_context
| void* ActionServerInternal::c_context |
C user context from init.
◆ c_goal_callback
| enum nros_goal_response_t(* ActionServerInternal::c_goal_callback) (struct nros_action_server_t *, const struct nros_goal_handle_t *, const uint8_t *, size_t, void *) |
C goal callback from init. Required.
◆ executor_ptr
| void* ActionServerInternal::executor_ptr |
Pointer to the internal executor (CExecutor).
◆ handle
| ActionServerRawHandle ActionServerInternal::handle |
Handle returned by executor registration. entry_index == INVALID_ENTRY_INDEX until registration completes.
◆ server_ptr
| struct nros_action_server_t* ActionServerInternal::server_ptr |
Pointer back to the C action server struct.
The documentation for this struct was generated from the following file:
- include/nros/nros_generated.h